
Byounghan Sung (성병한)
Ph.D. student
Department of Computational Science and Engineering(CSE)
Yonsei University, Seoul, Korea
[email protected]
Lab : Numerical Analysis Lab(612)
Advisor : Prof. Eunjung Lee
Interest
1. Partial Differential Equation
2. Numerical Methods for Partial Differential Equation
Research
The first-order system least-squares method for the Navier-Stokes equations
The first-order system LL* method for the Navier-Stokes equations
Ph.D. student
Department of Computational Science and Engineering(CSE)
Yonsei University, Seoul, Korea
[email protected]
Lab : Numerical Analysis Lab(612)
Advisor : Prof. Eunjung Lee
Interest
1. Partial Differential Equation
2. Numerical Methods for Partial Differential Equation
Research
The first-order system least-squares method for the Navier-Stokes equations
The first-order system LL* method for the Navier-Stokes equations
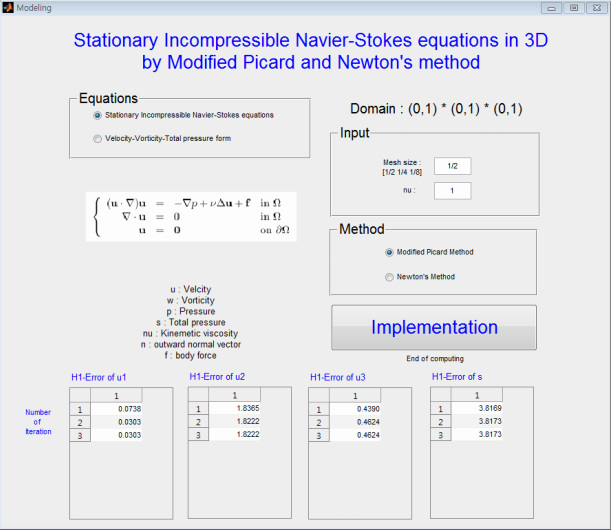
This picture is a screen shot of Matlab GUI standalone.
It solves the stationary incompressible Navier-Stokes equations in three-dimension by the first-order system least-squares method.
A domain is fixed as (0,1)*(0,1)*(0,1), and meshsize and nu can be chosen. It actually solves an equivalent first-order system(Velocity-Vorticity-Total pressure form) instead of the original equation. We can check the first-order form by clicking radio buttons in 'Equations' box.
Since the equations are nonlinear, linearization methods are needed in the process. We provides two linearization methods: the Modified Picard method and the Newton's method.
As output, it provides H1-errors of u1,u2,u3,s. The columns of each result table refer to the number of iterations.
It solves the stationary incompressible Navier-Stokes equations in three-dimension by the first-order system least-squares method.
A domain is fixed as (0,1)*(0,1)*(0,1), and meshsize and nu can be chosen. It actually solves an equivalent first-order system(Velocity-Vorticity-Total pressure form) instead of the original equation. We can check the first-order form by clicking radio buttons in 'Equations' box.
Since the equations are nonlinear, linearization methods are needed in the process. We provides two linearization methods: the Modified Picard method and the Newton's method.
As output, it provides H1-errors of u1,u2,u3,s. The columns of each result table refer to the number of iterations.
